Pulitori laser manuali e robotici: Cosa è meglio per l'uso industriale
Siete in un'officina meccanica all'alba. Pezzi in attesa, scadenze incombenti, tecnici che già si puliscono le mani dal grasso. Sul banco vedete due macchine che brillano dietro un vetro: una, un laser portatile; l'altra, un braccio robotico che passa sopra una cella. Qual è la scelta migliore?
Questa domanda non è teorica, ma strategica. La vostra decisione dice dove propendete: verso la flessibilità o verso la scala. Verso la creatività umana o la coerenza meccanizzata. Verso il limite dell'incertezza o verso la sicurezza di cicli prevedibili. In questo articolo voglio portarvi all'interno di questa tensione, con storie, rimpianti e schemi che vi aiuteranno a scegliere (o a combinare) in modo intelligente.
Perché è più importante delle specifiche tecniche
Sì, la produttività, il costo, la ripetibilità, l'ingombro sono parametri essenziali. Ma ho scoperto che i veri fattori di differenziazione non sono nelle schede tecniche. Si trovano in questi luoghi:
- Cosa succede sei mesi inquando un operatore non c'è più, i pezzi sono cambiati e la pulizia non è più "standard".
- Dove si nasconde il dolore: nella deriva della calibrazione, nel riallestimento, nell'addestramento, nella pulizia delle ottiche, nelle modalità di fallback.
- Come il vostro team percepisce il controllo, il rischio e la proprietà dei processi
Una macchina che sembra perfetta il primo giorno può diventare fragile, frustrante o costosa se si sceglie male. Scaviamo quindi sotto la superficie.
Palmare: L'uomo nel loop
La bellezza emotiva e operativa del palmare
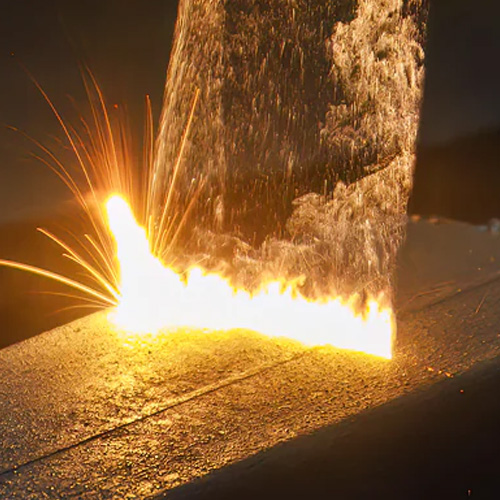
Quando si consegna a qualcuno una pistola laser, si sta consegnando a lui agenzia. Possono inclinarsi, ruotare, rallentare, fare un angolo strano. Questa libertà è il suo punto di forza: non è necessario un fissaggio perfetto, una linea di vista ovunque o una perfetta ripetibilità CAD-pezzo. In officina, dove la variazione è la norma, questa adattabilità è oro.
In effetti, in un'officina in cui ho lavorato, avevamo una strana staffa con sottosquadri. La cella robotizzata non riusciva a vedere il 10% delle superfici. L'operatore manuale, vedendo l'ombra, ha invertito l'angolo a metà della passata e ha portato a termine il lavoro. Quel momento mi ha fatto guadagnare più fiducia in quell'utensile di quanta ne abbia mai guadagnata una scheda tecnica.
La fragilità nascosta dei palmari
Tuttavia, questa flessibilità è accompagnata da una certa fragilità:
- La deriva della qualità è reale. Due operatori possono pulire lo "stesso pezzo" e ottenere variazioni evidenti. Stanchezza, velocità, oscillazione delle mani, angolazione: sono tutti errori che si susseguono.
- La formazione è sottovalutata. Un operatore in prima linea deve saper leggere le superfici, rallentare nelle zone difficili, indietreggiare in caso di striscio. Questo tipo di intuizione richiede settimane.
- L'ottica e l'allineamento del fascio si spostano maggiormente in presenza di movimenti umani. Urti, flessione dei cavi, spostamenti: tutti questi fattori si accumulano.
- La sicurezza è più rischiosa. Il fascio di luce è esposto; riflessi, angoli di dispersione, riflessi nascosti: è necessario sorvegliare, far rispettare gli interblocchi, allenarsi costantemente.
Si scambia la "rigidità incorporata" con la "fragile adattabilità".
Robotica: la macchina nel loop
Cosa offre la robotica
I robot vi portano ciò che gli esseri umani faticano a garantire:
- Ripetibilità. Se programmati, ad ogni ciclo seguono lo stesso percorso, la stessa velocità, la stessa messa a fuoco e la stessa sovrapposizione. La dispersione giornaliera diminuisce.
- Scalabilità del rendimento. Un robot non si stanca, non rallenta, non chiede straordinari.
- Vantaggi in termini di protezione e sicurezza. Gabbie, interblocchi, zone: i robot sono più facili da isolare e da gestire.
- Integrazione. È possibile collegare la cella laser a trasportatori, ispezioni o sensori a monte e a valle.
Un'officina automobilistica che ho visitato aveva una cella robotizzata che puliva le linee di saldatura di migliaia di staffe per turno. L'uniformità e la produzione ottenute sono semplicemente superiori a quelle ottenute da cinque operatori umani, e con tassi di superamento migliori.
Ma la robotica richiede disciplina
I sistemi robotici portano con sé i propri demoni:
- Il cambiamento è costoso. Se la geometria dei pezzi cambia o le tolleranze si spostano, un percorso robotico che ha funzionato ieri potrebbe fallire oggi. Riprogrammazione, riallestimento, riallineamento: questi sono costi reali.
- La rigidità può essere un ostacolo. Se il vostro flusso di lavoro è dinamico (pezzi strani, prototipi, pezzi unici), i robot rigidi vi frustreranno.
- Le spese generali iniziali sono elevate. Si spendono soldi per le attrezzature, le coperture di sicurezza, i sistemi di controllo e la pianificazione del movimento. Tutto ciò non è opzionale.
- La tolleranza ai guasti è bassa. Un'anomalia del robot, un disallineamento, una deriva ottica - e intere celle si fermano. I tempi di inattività possono essere molto pesanti.
- La calibrazione e la manutenzione richiedono una specializzazione. Servono ingegneri robotici, contratti di assistenza, pezzi di ricambio, programmi di calibrazione regolari.
La robotica è ottima, se ci si basa sui suoi punti di forza e ci si difende dalle sue modalità di fallimento.

Leve decisionali profonde: Cosa muove davvero l'ago della bilancia
Parliamo delle leve interne che dovreste valutare: non solo caratteristiche, ma segnali che rivelano dove si trova il vostro successo.
1. Variazione vs. Volume
Se i vostri pezzi cambiano raramente - stessa geometria, stesso orientamento, fissaggio stabile - la robotica è un oro. Ma se si introducono regolarmente nuovi pezzi, serie pilota o modifiche, la flessibilità del palmare vi permette di sopravvivere in questo mondo.
2. Margine sugli errori
Il vostro processo è in grado di assorbire alcuni errori di pulizia, rilavorazioni o variazioni dell'operatore? Oppure avete bisogno di difetti prossimi allo zero? Quanto più rigida è la tolleranza di qualità a valle (ad esempio, preparazione delle saldature, superfici aerospaziali), tanto più si dovrà puntare sulla robotica.
3. Costo nascosto dell'adattamento
Considerate: quanto spendete per rifissare, testare, addestrare, pulire le ottiche, ricalibrare in modalità portatile? Nel tempo, queste "spese generali minori" si accumulano. Costruite un modello di "differenziale di costo dell'anno 2".
4. Psicologia del team e fiducia
Ho visto gruppi di lavoro opporsi all'automazione robotizzata perché sembrava che togliesse il controllo. Altri si oppongono agli strumenti manuali perché temono l'incoerenza dell'operatore. A volte la tecnologia "migliore" fallisce perché il personale non si fida. Coinvolgete gli operatori fin dall'inizio: lasciateli pilotare, confrontare, fidarsi dei dati.
5. Fallback e design ibrido
Progettare un ripiego. Anche una cella robotizzata dovrebbe avere una modalità di esclusione manuale. Allo stesso modo, gli strumenti manuali dovrebbero essere dotati di ausili per il fissaggio, in modo che l'operatore possa "prendere in prestito" la consistenza quando necessario. La combinazione di entrambi non è una capitolazione, ma una copertura strategica.

Uno scenario: come costruirei una strategia di transizione
Se fossi nei vostri panni, con lavori di medio volume, pezzi strani e ambizioni di scala, ecco come affronterei la questione:
- Iniziare con un palmare. Utilizzatelo per prototipi, manutenzione, pezzi variabili. Lasciate che dimostri il suo valore, che crei fiducia, che raccolga dati (tempi di pulizia, variazione dell'operatore, copertura dei pezzi).
- Strumento pesantemente. Registrare i dati: quali parti devono sempre essere rilavorate? Dove gli operatori fanno fatica? Dove si manifesta la deriva?
- Identificare sottoinsiemi stabili. Individuare i componenti o le operazioni che cambiano raramente e che sono ideali per la robotica.
- Pilotare una cella robotica su questi sottoinsiemi stabili. Utilizzare gli insegnamenti tratti dai "fallimenti" manuali per progettare percorsi, attrezzature e zone di ripiego.
- Con il tempo, espandere il dominio robotico mantenendo il palmare per le eccezioni. Mantenere un set di strumenti unificato e team con formazione trasversale.
Questo approccio offre sicurezza, riduce il rischio di "scommettere molto e sbagliare" e permette all'automazione di crescere intorno al vostro processo reale.
Talk to Bogong Laser Cleaning Machines ExpertsGet a Quote or Customized Solution for Your Application

-
Whatsapp: +86-15665870861
-
E-mail: info@bogongcnc.com